Título: Symmetries and periodic orbits in simple hybrid Routhian systems.
Autores: Leonardo Colombo (Instituto de Ciencias Matemáticas – Universidad Autónoma de Madrid) y María Emma Eyrea Irazú (Consejo Nacional de Investigaciones Científicas y Técnicas de Argentina – Centro de Matemáticas de La Plata de la Universidad Nacional de La Plata)
Fuente: Nonlinear Analysis: Hybrid Systems, Volume 36
Fecha de publicación: aceptado, pendiente de publicación
Resumen:
Un sistema híbrido es un sistema dinámico compuesto de dos fases: una dinámica, a tiempo continuo, y una aplicación discreta, usualmente llamada función de impacto o de reseteo. Un ejemplo de este tipo de sistemas es el andar de un bípedo: la pierna se modela como un péndulo, que es un sistema dinámico a tiempo continuo, y cuando el extremo del péndulo (es decir, el pie) se apoya en el suelo, se produce una fuerza de reacción (es la función de impacto), que modifica el movimiento de la pierna que vuelve a moverse siguiendo la dinámica de un péndulo (ver Figura 1). El suelo es la superficie de impacto: una hipersuperficie de co-dimension uno del espacio de configuraciones del sistema. La dinámica del sistema mecánico se describe mediante ecuaciones diferenciales. Para resolverlas, se reduce la dimensionalidad de las ecuaciones recurriendo a las simetrías del sistema.
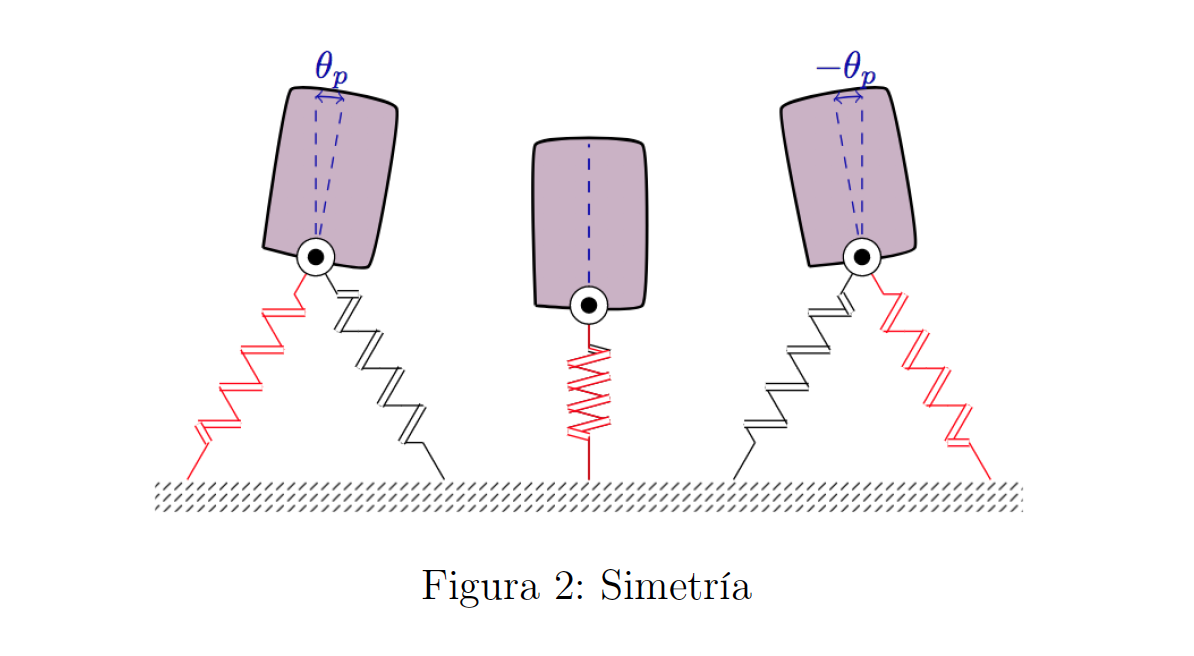
Una simetría es una función que deja invariantes las soluciones de un sistema dinámico. Según el clásico teorema de Noether, las simetrías dan lugar a cantidades conservadas del sistema, que son precisamente lo que permite reducir la dimensión de las ecuaciones. Un tipo de simetría que muestran los sistemas hamiltonianos es la simetría de tiempo reversible. Estas simetrías dejan invariantes las soluciones de un sistema dinámico hamiltoniano si el tiempo corriese en sentido inverso: es decir, la trayectoria en tiempo t es como en tiempo -t. En algunos bípedos, la invarianza se da en la trayectoria que describe el ángulo de la cadera (ver Figura 2).
En concreto, interesa estudiar ciertas soluciones: aquellas cuyo comportamiento se repite después de un periodo de tiempo. Son las órbitas periódicas. Ya Henri Poincaré estudió la existencia de órbitas periódicas en sistemas de interés en mecánica celeste. Desde entonces es un problema matemático clásico. El comportamiento de estas órbitas se puede estudiar mediante la llamada aplicación de Poincaré. Para construirla habitualmente se recurre a métodos computacionales para la integración de ecuaciones diferenciales.
Sin embargo, en un reciente artículo, aceptado en la revista Nonlinear Analysis: Hybrid Systems, Leonardo Colombo (Instituto de Ciencias Matemáticas – Universidad Autónoma de Madrid) y María Emma Eyrea Irazú (Consejo Nacional de Investigaciones Científicas y Técnicas de Argentina – Centro de Matemáticas de La Plata de la Universidad Nacional de La Plata) construyen un método que no emplea herramientas computacionales para asegurar la existencia de órbitas periódicas en sistemas híbridos reducidos, que poseen un simetría de tiempo reversible. “En general, las ecuaciones no-lineales que estudiamos no tienen solución analítica, y, como mucho, se puede obtener una aproximación numérica”, explica Colombo. “Nosotros damos condiciones suficientes para garantizar que exista una solución periódica del sistema, y dar explícitamente el periodo”, añade.
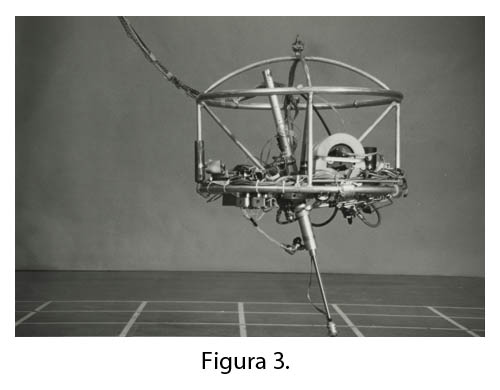
Además estudian condiciones suficientes para caracterizar la estabilidad de estas órbitas. El resultado se aplica a una clase de sistemas de control utilizados para estudiar propiedades de locomoción en robots. En particular los autores lo han empleado para el clásico modelo de robot saltarín, llamado en ingles “hopper robot”, cuya pierna se describe como un péndulo invertido con resorte, llamado en inglés spring loaded inverted pendulum o SLIP model (ver Figura 3).
Este trabajo fue parte de la tesis doctoral de María Emma Eyrea Irazú, dirigida por Leonardo Colombo y Marcela Zuccalli (Centro de Matemáticas de La Plata de la Universidad Nacional de La Plata) en el Departamento de Matemáticas de la Universidad Nacional de La Plata, que defendió en diciembre de 2019.